Die Flugzeugnotfanganlage ATU-G/1A
Prinzipdarstellung zur Fanganlage ATU-G/1A
...=>
![]()
Flugzeugnotfanganlagen sind selbständige Vorrichtungen zum Notabbremsen von Flugzeugen am Boden. Ihre Aufgabe besteht darin, bei einer Havarielandung oder bei einem Startabbruch Leben und Gesundheit der Flugzeuginsassen sicher zu bewahren. Kann der Flugzeugführer am Ende der Start- und Landebahn das Flugzeug nicht rechtzeitig zum Stehen bringen, so wird der Halt mit Hilfe der Flugzeugnotfanganlage erzwungen.
Dieses zusätzliche Sicherheitsprinzip wird gegenwärtig ausschließlich
auf Militärflugplätzen genutzt. Dabei wird unterschieden zwischen Fanganlagen,
die einen Fanghaken am Flugzeug voraussetzen, wie z.B. für Seil- oder Kabelfanganlagen
(bekanntester Einsatz auf Flugzeugträgern), und Fanganlagen die ausschließlich
als Notfanganlagen wirksam werden ohne konstruktive Besonderheiten am Flugzeug
vorauszusetzen. Letztere sind mit einem Fangnetz ausgerüstet und müssen für viele
Flugzeugtypen wirksam werden, d.h. für ein breites Masse- und Geschwindigkeitsspektrum
im Havariefall. Um dieser Forderung gerecht werden zu können, ist eine automatische
Regelung des Abbremsverlaufes erforderlich, die hohe Ansprüche an die Beherrschung
der dynamischen Baugruppen einer solchen Flugzeugnotfanganlage während des Notabbremsen
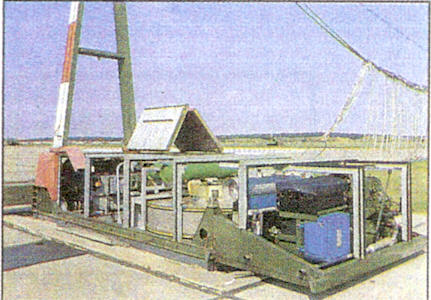
setzt. Die in Dresden von 1976 bis 1979 entwickelte ATU - G/1A ist eine vollautomatisch
arbeitende Flugzeugnotfanganlage, die im Havariefall Flugzeuge mit einer Masse
bis zu 20 t und einer Havarie- Einrollgeschwindigkeit bis zu 360 km/h (bzw. 194
kn) auf eine maximale Bremsstrecke von 330 m abbremst. Sie stellt eine der ersten
Automatisierungsanlagen dar, die bereits 1977 mit einer Mikrorechnersteuerung
ausgerüstet wurden.

Erprobung der ATU-G/1A Alteno 1977 - die MiG-23 im Fangnetz.
Der Aufbau der Fanganlage ATU-G/1 zur Erprobung 1977 in Alteno
wird hier veranschaulicht:
...=>
![]()
Weitere Bilder von der Erprobung sind hier wiedergegeben:
...=>
![]()


Die entwickelte Steuerstrategie wurde durch ausführliche Simulationsuntersuchungen
überprüft, bevor sie 1996 durch reale Testfangversuche in der Wehrtechnischen
Dienststelle für Luftfahrzeuge in Manching mit einem Flugzeug Phantom F4 erprobt
wurde. Die Simulationsstruktur ist hier wiedergegeben.
...=>
![]() Um Beschädigungen am Flugzeug auszuschließen, die bei Netzfanganlagen unvermeidbar
sind, wurde die ATU-G/1A als Seil- bzw. Kabelfanganlage umgerüstet. Für diese
Umrüstung war einfach die Verbindung beider Anlagenseiten mit dem Fangseil (Fangkabel)
statt des Fangnetzes vorgenommen worden. Die Testfangversuche wurden in den beiden
Modifikationen des Flugzeuges mit den Flugzeugmassen von 19 t und 23 t durchgeführt.
Die vorgegebenen und realisierten Einrollgeschwindigkeiten lagen zwischen 120
km/h und 280 km/h, d.h. zwischen 65 kn und 151 kn. Bei allen Fangversuchen wurde
in der Hauptabbremsphase ein gleichmäßiges Abbremsverhalten registriert. Aus den
Nachauswertungen ging hervor, dass die dabei auftretenden Verzögerungen einen
gleichmäßigen Verlauf zeigten und unterhalb von 20 m/s², d.h. unter 2 g lagen.
Ein besonderes Interesse hinsichtlich der Auswertung kommt dem Fangversuch zu,
bei dem in der Erprobung eine F4 mit Zusatzmassen (Gesamtgewicht 23 t) mit einer
Einrollgeschwindigkeit von 74 m/s (266 km/h oder 144 kn) abzubremsen war. Bei
diesem Versuch wurde aus allen Erprobungsversuchen der höchste Anteil an kinetischer
Energie durch die Bremsanlagen in kürzester Zeit umgesetzt.
Um Beschädigungen am Flugzeug auszuschließen, die bei Netzfanganlagen unvermeidbar
sind, wurde die ATU-G/1A als Seil- bzw. Kabelfanganlage umgerüstet. Für diese
Umrüstung war einfach die Verbindung beider Anlagenseiten mit dem Fangseil (Fangkabel)
statt des Fangnetzes vorgenommen worden. Die Testfangversuche wurden in den beiden
Modifikationen des Flugzeuges mit den Flugzeugmassen von 19 t und 23 t durchgeführt.
Die vorgegebenen und realisierten Einrollgeschwindigkeiten lagen zwischen 120
km/h und 280 km/h, d.h. zwischen 65 kn und 151 kn. Bei allen Fangversuchen wurde
in der Hauptabbremsphase ein gleichmäßiges Abbremsverhalten registriert. Aus den
Nachauswertungen ging hervor, dass die dabei auftretenden Verzögerungen einen
gleichmäßigen Verlauf zeigten und unterhalb von 20 m/s², d.h. unter 2 g lagen.
Ein besonderes Interesse hinsichtlich der Auswertung kommt dem Fangversuch zu,
bei dem in der Erprobung eine F4 mit Zusatzmassen (Gesamtgewicht 23 t) mit einer
Einrollgeschwindigkeit von 74 m/s (266 km/h oder 144 kn) abzubremsen war. Bei
diesem Versuch wurde aus allen Erprobungsversuchen der höchste Anteil an kinetischer
Energie durch die Bremsanlagen in kürzester Zeit umgesetzt.
Zeitlicher Verlauf der Zustandsgrößen am Flugzeug F4 (Masse =
23t) bei der Erprobung mit einer Einrollgeschwindigkeit von 266 km/h
aF: Flugzeugbeschleunigung in m/s² (Minimum: -14 m/s² ca. -1,4 g),
vF: Flugzeuggeschwindigkeit in m/s (Maximum bei t = 0: vF(0) = 74 m/s = 266 km/h
= 144 kn),
sF: Abbremsweg in m (Maximum: sF = 264 m) und
FH: Abbremskraft am Fanghaken des Flugzeuges in kN (Maximum: FH = 275 kN)
Zum obigen Fangvorgang ist die automatisch erstellte Messauswertung vom rechten Bremskörper über die Zeit (in Sekunden) grafisch wiedergegeben.
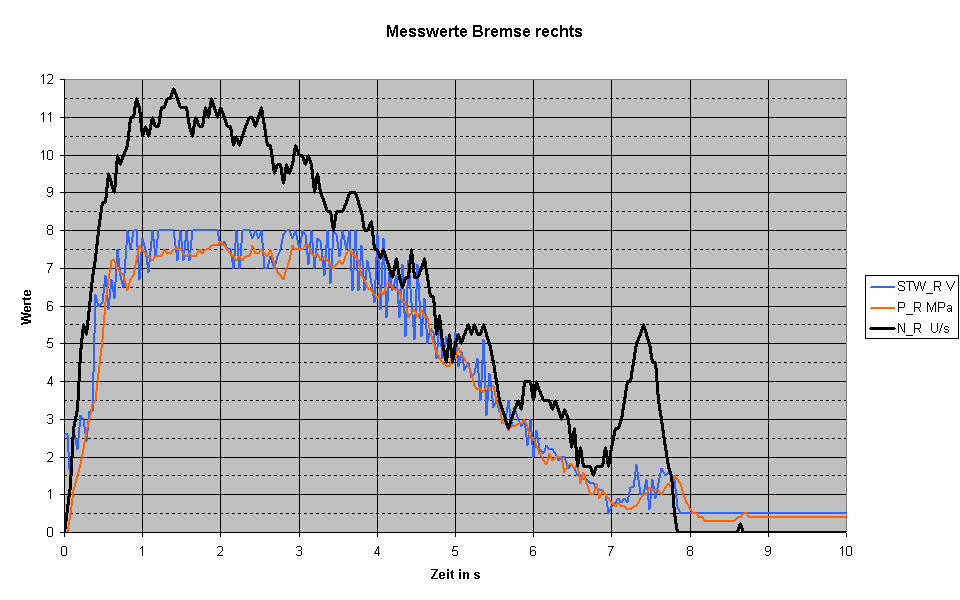
Darin sind mit N_R die gemessene Drehzahl der Bremstrommel (in
U/s), mit STW_R der vom Rechner berechnete und für die Hydraulik vorgegeben Steuerwert
(Stellwert als Analogwert in V) und mit P_R der gemessene Druck (Regelgröße der
Hydraulik in MPa) definiert. (R steht für rechten Bremskörper.)
Sehr gut sind bei der Steuerwertausgabe (STW_R) des Rechners Impulsüberlagerungen
zu erkennen, die ein überlagertes pulsmoduliertes D-Verhalten charakterisieren,
das dämpfend auf das nichtlineare und komplizierte "Masse- Federsystem" wirkt.
Bei mit Bremsgurten ausgerüsteten Fanganlagen entsteht naturgemäß ein Masse- Federsystem.
Der Gurt erfährt eine Dehnung von bis zu 25% während des Fangvorganges, die nichtlineare
Federkonstante verringert sich um das 15 fache durch den Gurtauszug von 17m auf
bis zu 270 m und die Trägheitsmasse der Bremstrommel verringert sich ebenfalls
in gleicher Größenordnung beim Abwickeln des Gurtpaketes. Die Verringerung des
Radius beim Abwickeln des Gurtpaketes von ca. 85 cm auf 35 cm erhöht den Faktor
zwischen Bremsmoment und Umfangskraft, d.h. Gurtkraft, auf um das ca. 2,5 fache.
Zusätzlich kompliziert die Netzgeometrie die Bremswirkung der Gurtkräfte. Klassische
Verfahren der Regelungstechnik versagen hier da noch zusätzlich bei der ATU-G/1A,
konstruktiv und messtechnisch bedingt, die Genauigkeit (Umfangsgeschwindigkeit
grob diskretisiert in Schritten von 1/4 U/s) und die Abtastintervalle (von 40
ms Dauer) den dafür notwendigen Anforderungen nicht entsprechen. Es wurde ein
zustandsabhängiges Steuerregime mit Überlagerung eines pulsmoduliertem D- Verhalten
als Regelungstrategie gewählt, dabei alle beschriebenen Nichtlinearitäten berücksichtigt,
in C programmiert und in einen Steuerungsrechner implementiert.
In der automatischen Messwertauswertung ist am Ende des Fangvorganges (bei ca.
7 sec.) ein starkes Ansteigen der Drehzahl der Bremstrommel zuerkennen. Damit
wird Gurtlänge freigegeben, um die in den Bremsgurten gespeicherte Spannung abzubauen.
Somit wird ein Zurückreißen des Flugzeuges am Ende des Fangvorganges weitestgehend
vermieden.
Video zum obigen Fangversuch:
Video zum Fangversuch Nr.:5 vom 20.06.1996:
Der 5. Fangversuch aus den Erprobungen mit 279 km/h Einrollgeschwindigkeit war zwar der Fangversuch mit der höchsten Geschwindigkeit, jedoch durch die geringere Masse von 19 t nicht der Energiereichste. Der hier untersuchte 8. Fangversuch war hinsichtlich der in den Bremsen umgesetzten kinetischen Energie (von ca. 63 MJ) der höchste der Testerprobungen. Bei dieser Energieumformung innerhalb kürzester Zeit ist die Aufnahme von Leistungsspitzen erforderlich, die oberhalb von 10 MJ/s je Bremse liegen. Um diesen Wert zu veranschaulichen, ist eine Analogiebetrachtung zu modernen Triebfahrzeugen möglich. Jede Bremse musste kurzzeitig die Leistung aufnehmen, die von 3 oder 4 Lokomotiven erzeugt werden kann. Trotz dieser hohen Werte lag der Energieanteil unterhalb der Grenze, für die die Flugzeugnotfanganlage ATU-G/1A ausgelegt ist. Es sind Reserven vorhanden, die auch das Abbremsen von Flugzeugen mit Massen um 20 t und Geschwindigkeiten bis 100 m/s (d.h. 360 km/h oder 195 kn) ermöglichen. Als ein weiteres Ergebnis aus dieser Erprobung kann die Feststellung gewertet werden, dass die Flugzeugnotfanganlage ATU-G/1A, die ursprünglich nur als Netz- Fanganlage konzipiert und entwickelt wurde, auch die Anforderungen erfüllt, die an den Abbremsverlauf für eine Hakenfanganlage gestellt werden. Durch den rechnergesteuerten Bremsverlauf wird unabhängig von Bremstrommeldrehzahlen die Abbremskraft gleichmäßig über die gesamte Abbremsstrecke verteilt. Damit konnte ein Nachteil behoben werden, der bei mit Wasserwirbelbremsen ausgestatteten Flugzeugfanganlagen besteht. Da durch den eingesetzten Steuerungs- und Regelungsrechner die gemessenen physikalischen Größen abgespeichert werden, die sich mittels eines PC (Laptop) direkt auslesen lassen, sind stattfindende Fangvorgänge schnell und exakt auswertbar. Somit eignet sich die Flugzeugnotfanganlage ATU-G/1A auch als Fanganlage mit der die Abfangbelastung und das Abfangverhalten von neu einzusetzenden Flugzeugen sowohl durch Simulation als auch für eine definierte Versuchsvorhersage genutzt werden kann.

Das Erprobungsteam in Manching 1996
Resümee:
Die Flugzeugnotfanganlage
ATU-G/1A war eines der ersten Automatisierungsobjekte der DDR für das bereits
1975/76 (also noch vor entsprechende Beschlüsse zur Einführung der Mikroelektronik)
eine Mikrorechnersteuerung bzw. -regelung konzipiert wurde. Bereits im Erprobungsmuster
wurde 1977 erstmalig ein Mikrorechner als Steuerungs- und Regelungsrechner eingesetzt.
Da zu diesem Zeitpunkt in der DDR noch keine industriell gefertigten Mikrorechner
verfügbar waren kam 1976 eines der ersten gefertigten Funktionsmuster des VEB
Robotron, mit der Bezeichnung MR1, zum Einsatz. Es war das zweite Funktionsmuster
aus dem VEB Robotron das 1977 auch bei den ersten Fangversuchen in Alteno eingesetzt
wurde. Das erste Funktionsmuster ging an das RFZ in Berlin zur Vorbereitung von
Steuerungsaufgaben für die Fernsehübertragung der Olympischen Spiele 1980. Seine
praktische Anwendung ist unbekannt.
Mit dem ersten Fertigungsmuster der Flugzeugnotfanganlage ATU-G/1A kam 1979 der
Mikrorechner K1510 zum Einsatz. Dieser übernahm neben der Steuerung des Abbremsverlaufes
auch Überwachungsfunktionen des Hydraulik- Drucksystems, des Bremsen- Gurtsystems
und bei Wartungsarbeiten auch erste Servicefunktionen. So war es bereits 1979
möglich im Servicefall das dynamische Verhalten des Hydraulikbremssystems hinsichtlich
Druckaufbau und Druckregelung rechnergestützt zu überprüfen und automatisch erstellte
Prüfprotokolle mit Hilfe eines Fernschreibers im Feld auszudrucken. Der K1510
wurde auch zur automatischen Versuchsauswertung bei der Erprobung von Fangversuchen
eingesetzt. Diese Erprobungen erfolgten 1979 in Alteno mit dem ersten Fertigungsmuster
der Flugzeugnotfanganlage und mit Flugzeugen vom Typ MiG-21 und MiG-23 bis zu
Einrollgeschwindigkeiten von 250 km/h. Hier wurden auch erstmalig zwei Mikrorechner
zur Informationsübertragung und Versuchsauswertung als Netz gekoppelt. Nach jedem
Fangversuch wurde über eine Leitungsentfernung von über 200 m ein zweiter Mikrorechner
im Laborwagen mit den Informationen des Steuerungsrechners aus der Flugzeugnotfanganlage
automatisch versorgt, d.h. es wurde ein Abbild des Speicherinhaltes des Steuerungsrechners
geschaffen. Damit konnten die zeitaufwendigen Versuchsauswertungen im Laborwagen
automatisiert werden ohne die folgende Versuchsvorbereitungen durch Blockieren
des Steuerungsrechners zu behindern. Neben automatisch erstellten Versuchsprotokollen
wurden auch Messreihen physikalischer Größen grafisch aufbereitet und analysiert.
Dazu wurden über selbstgefertigte D/A Umformer grafische Ausgabegeräte, u.a. XY-
Schreiber, angesteuert. In der Produktion wurden weitere Mikrorechner eingesetzt.
Sie automatisierten sowohl einen notwendigen Dauertest als auch klimatische Überprüfungen
der Rechnereinheiten der Flugzeugnotfanganlage. Damit gelang es auch Anlagen für
den Einsatz in wärmere Klimazonen automatisch auszumessen. Solche Verfahren wurden
später als CAD/CAM Lösungen bezeichnet. Davon war uns 1979 natürlich noch nichts
bekannt ![]() . Hier
einige Eindrücke aus der Zeit der Erprobung in Alteno 1979
...=>
. Hier
einige Eindrücke aus der Zeit der Erprobung in Alteno 1979
...=>
![]()
Das Fertigungsmuster wurde noch 1979 an die CSSR ausgeliefert. Die nächste Anlage
ging nach Peenemünde und kam bereits 1980 zum Einsatz. Hier ein Bericht aus der
Chronik von Peenemünde.
...=>![]()
Der letzte Fangvorgang in der DDR dürfte am 27.09.1990 in Laage mit einer SU-22
passiert sein. Dazu habe ich im Internet folgende Bilder gefunden
...=>![]()
Bis 1996 war der K1510 in Flugzeugnotfanganlagen vom Typ ATU-G/1A, die auch in
verschiedene Länder exportiert wurden, im Einsatz.
1996 wurden der K1510 durch PEP- Modularcomputer ersetzt, siehe oben. Im Rahmen
dieser Substitution wurden die Regelungs- und die Serviceprogramme überarbeitet
und damit das Einsatzspektrum insbesondere für mögliche Einrollgeschwindigkeiten
erweitert. Die Erprobungen wurden 1996 in der Wehrtechnischen Dienststelle für
Luftfahrzeuge in Manching mit einem Flugzeug vom Typ Phantom F4 bis zu Einrollgeschwindigkeiten
von 280 km/h durchgeführt.
Durch die Verlegung der MiG-29 Staffel von Preschen nach Laage wurden Mitte der
neunziger Jahre die noch verbliebenen Flugzeugnotfanganlagen, die als transportable
Anlagen ausgelegt waren, mit umgesetzt. Satellitenaufnahmen zeigen die Flugzeugnotfanganlage
ATU-G/1A
- auf dem Fliegerhorst Laage
...=>
![]()
- auf dem Ausweichplatz für die MiG-29 bei Trollenhagen
...=>
![]()
- und auf dem Flugplatz der Wehrtechnischen Dienststelle für Luftfahrzeuge in
Manching
...=>
![]()
Mit der Übergabe der Jagdflugzeuge vom Typ MiG-29 an Polen wurden die Wartungsarbeiten
der Flugzeugnotfanganlagen ATU-G/1A im Jahre 2004 eingestellt.
Betrachtet man den Einsatz der Mikrorechnergesteuerten Flugzeugnotfanganlage
ATU-G/1A ab dem Fertigungsmuster 1979 bis zur Ablösung bzw. Einstellung der
Wartungsarbeiten im Jahre 2004 als deren Lebenszeit, so dürfte es mit 25 Jahren
das Mikrorechnerprojekt aus der DDR sein, das nicht nur eines der ersten war,
sondern das auch am längstem zum Einsatz kam. Vergleiche hierzu auch:
...=>
![]() "Erstmaliger
Einsatz von Mikrorechnern in verkehrsdienstlichen und -technischen Prozessen",
Beitrag zur Konferenz "Informatik in der DDR" an der Humboldt Universität zu Berlin
vom 16.09. bis 17.09.2010
"Erstmaliger
Einsatz von Mikrorechnern in verkehrsdienstlichen und -technischen Prozessen",
Beitrag zur Konferenz "Informatik in der DDR" an der Humboldt Universität zu Berlin
vom 16.09. bis 17.09.2010
Die ATU-G/1A war offensichtlich auch weltweit die erste Flugzeugnotfanganlage
mit einer Mikrorechnersteuerung. Erst am 12.10.2010 wurde durch die
Engineered Arresting Systems Corporation
das Markenrecht unter dem Eintrag 85150706 für SmartArrest beantragt
(Datum der Bestätigung: 27.03.2012), für eine computergesteuerte Flugzeugfanganlage
...=>
![]() .
Das erste Exemplar wurde 2011 geliefert, d.h. 32 Jahre
nach der Auslieferung des 1. Fertigungsmuster der ATU-G/1A an die Tschechoslowakische
Armee (1979).
.
Das erste Exemplar wurde 2011 geliefert, d.h. 32 Jahre
nach der Auslieferung des 1. Fertigungsmuster der ATU-G/1A an die Tschechoslowakische
Armee (1979).
|
|
|
Computergesteuerte Flugzeugfanganlage
BAK-12 SmartArrest (ausgeliefert 2011), 32 Jahre nach |
In der Zeitschrift
"Braking News" (2/2011) ist eine Information zum Testprogramm und zur Auslieferung
der ersten SmartArrest enthalten (siehe auch
...=>
![]() ).
).
Eine kurze Funktionsbeschreibung ist enthalten bei Aircraft Arresting System
unter "Process Automation"
...=>
![]() (oder siehe auch die folgende pdf- Datei
...=>
(oder siehe auch die folgende pdf- Datei
...=>
![]() ).
).
Noch eine Bemerkung zum Einsatz von Flugzeugnotfanganlagen ausschließlich für
den militärischen und nicht für den zivilen Bereich.
Bei der Entwicklung der ATU-G/1A wurden Simulationsprogramme entwickelt an denen
die Steuerungsstrategien untersucht wurden. Die Übereinstimmung zwischen simulierten
Vorhersagen und den Ergebnissen aus realen Testerprobungen waren ausgezeichnet.
Was lag nun näher, als aus der Vergangenheit bekannte Havarien die zum Überrollen
der Start- und Landebahn in der zivilen Luftfahrt führten, z.B. Schönefeld 1989,
zu untersuchen. Es ist natürlich klar, dass die ATU-G/1A nicht als Abbremsanlage
für diese großen Flugzeugmassen ausgelegt ist, aber die Simulationsuntersuchungen
zeigten, dass durch solch eine Anlage die (Überroll-) Geschwindigkeit soweit verringert
werden kann, dass der Ausrollweg wesentlich verkürzt und in vielen Fällen der
Ort der zum Zerstören der Flugzeuge mit Todesfolgen führte nicht erreicht wurde.
Das Unglück der Concorde am 25. Juli 2000 nach dem Start von Paris-Charles de
Gaulle war unvermeidbar, da bei Eintreten des Havariefalls die Geschwindigkeit
bereits so hoch war, dass ein Startabbruch ohne Überrollen der Start- und Landebahn
nicht mehr möglich war. Der Start musste durchgeführt werden und der Absturz war
unvermeidbar.
Der Einsatz von Flugzeugnotfanganlagen auch im zivilen Bereich wäre unter den
aus der Historie bekannten Stör- und Havariefällen zumindest diskussionswert.
Hier finden sich weitere
Diskussionen auch von Betroffenen:
...=>
![]() Flugzeugnotfanganlage
ATU-G/1A - Flugzeugforum
Flugzeugnotfanganlage
ATU-G/1A - Flugzeugforum
Auch aus dem Internet,
eine F104 in einer Notfanganlage:
...=>
![]()
... und das Abfangen
einer SA3 Viking auf einem Flugzeugträger:
...=>
![]()
... auch auf einem Flugzeugträger sind Notfanganlagen sinnvoll:
...=>
![]()
Lehrfilm, erstellt bei der Erprobung der ATU/G1 in Alteno 1977:
...=>
![]()
